芯片厂商开放
版本:Rev 0.6
文档内容拷贝自:
codebase_host/yunhal/opendoc/zh/user_guide/system_configurable.md
联系人: 王作省 (zuosheng.wzs@alibaba-inc.com)注意:本文将尽可能将Syscap实现原理精简化,但因为有些细节必须讲清楚,所以篇幅会稍长。若读者优先关心如何实现本模块的参数化配置,建议直接跳到 <样例:powerd模块> 参考具体实现,再回过头来看原理的信息。
介绍
Syscap是基于 parameter framework 实现,用于表征 YunOS 系统硬件能力和特性的组织形式,实现系统功能和特性的可配置化。Syscap主要将整体分为 HWCapability 和 OSCapability 两类,分别描述系统的硬件能力的配置和OS Framework的能力。期望能通过清晰的结构化形式,方便厂商和系统服务开发者们配置和访问系统各项属性,并将参数调优工作从代码逻辑的层面抽取出来,便于动态调整。
Syscap采用的XML结构化方式主要分为两部分,即为 Schema 和 Config 。其中,_Schema_ 相当于表述系统特性和模块能力的属性列表,包括 HWCapability 中描述系统各部分所有属性的汇总,也包括 OSCapability 中各个模块自有的多种属性,但它并不涉及每项属性默认的参数设定,这项工作主要在*Config* 中完成。在 Config 中可以根据平台需求,选择暴露 Schema 描述中的一部分属性,然后指定默认值形成Key-Value的对应关系。另外,根据参数数值的不同,可以明确指定其数据类型,比如整型,布尔型,浮点型或者字符串等类型,当然也可以添加 ArrayLength 字段使之增强为对应的类型数组,比如整型数组,浮点数组等。
组织形式
续前文介绍,配置化文档存放于[codebase_host]/vendor/sprd/sc9832_n/syscap文件夹里,结构组织如下表所示。在 syscap_entry.xml 文件中,指定了包含各 Schema 和 Config 文件的相对路径以及层次关系,在访问程序中作为解析所有关联配置文件的 唯一入口。系统里所有的 Schema 配置信息全部由 syscap_schemas.xml 文件展开,容易注意到 HWCapability 和 OSCapability 分别以两个不同的 Virtual Subsystem 形式存在;而所有的 Config 文件都将逐一包含在 syscap_configs.xml 中,然后分别在各自的ConfigurableDomain 域中按规则设定。
[syscap]
└── syscap_entry.xml
├── syscap_schemas.xml
├── syscap_configs.xml
├── [hwcapability]
│ ├── syscap_schemas_hw_all.xml
│ └── syscap_configs_hw_all.xml
└── [oscapability]
├── syscap_schemas_os_powerd.xml
├── syscap_configs_os_powerd.xml
├── syscap_schemas_os_audio.xml
└── syscap_configs_os_audio.xml
有了这些描述文件,大家可能会一直有这样的疑问:到底如何访问到系统的每个属性呢?其实,系统的属性都以类似于文件系统路径的形式存在,比如Sensor模块是否支持light sensor,就可以用 /syscap/hw/sensor/LightSensorSupported 访问到。这里每一级路径对应于Schema中的各级描述,分别有/syscap/(*SystemClass*), hw/(*Subsystem*), sensor/(*ComponentType*), LightSensorSupported(*BooleanParameter*),并可以根据实际情况可以将 ComponentType 这级扩展成 1…N 级,形成层次化的描述。
接下来,我们再看看具体的实现:
- syscap_entry.xml 文件定义了全局唯一的
SystemClass,名字为syscap - syscap_schemas.xml文件中包含两个
Subsystem,名字分别为os和hw,都将由各个硬件模块构成。其中Subsystem: hw以SubsystemInclude的方式被包含,实际定义在syscap_schemas_hw_all.xml文件里,主要用于覆盖系统里所有模块的hwcapability;Subsystem: os则在直接定义后,将逐一包含系统多个模块的Schema规则。另外,每个Subsystem又包含:ComponentLibrary和InstanceDefinition,此两者皆只能有一组,但是范围域包含的元素可以有多个。ComponentLibrary(等价的有ComponentTypeSet)中可包含1个到多个ComponentType,可理解为 属性组 的概念- 每个属性组
ComponentType又可以包含多个 子属性组 ,以Component标签表示;或者可以直接包含1到多个 属性 ,以BooleanParameter,IntegerParameter,EnumParameter,FixedPointParameter,StringParameter等形式组织,在这些属性的描述中增加ArrayLength字段可使之支持数组形式的数据 InstanceDefinition域中可包含多个Component用于 实例化 表示上述的ComponentType,相当于文件系统中增加某个文件夹节点,如上例中的sensor
- syscap_configs.xml中包含系统所有的config文件声明。 syscap_configs_hw_all.xml和syscap_configs_os_powerd.xml分别描述了系统全局和单独模块自身的初始值设置。其中每个文件需要在自己的
ConfigurableDomain中指定名称描述并模块各自附带属性的描述,主要由Configurations、ConfigurableElements和Settings三个必要部分组成:Configurations可以根据需求定义不同的策略,此处略过不做介绍,audio等带有复杂policy的模块可进一步研究ConfigurableElements是三者中 最为关键 的描述,控制当前export出来的所有属性或者某级根节点。syscap_configs_hw_all.xml目前实现中给出的都是某级根节点,读者可以根据自己的需求暴露叶子节点或者某级根节点,只需保证与Settings中的描述一致即可。Settings是真正描述属性初始值的地方,简单来说,这里的所有属性都来自上方的Configuration和ConfigurableElement,因而必须跟上方保持一致的名称。这里也要注意,若ConfigurableElement中为某级根节点,那么需要增加ParameterBlock域,否则直接定义具体的值即可。
代码访问
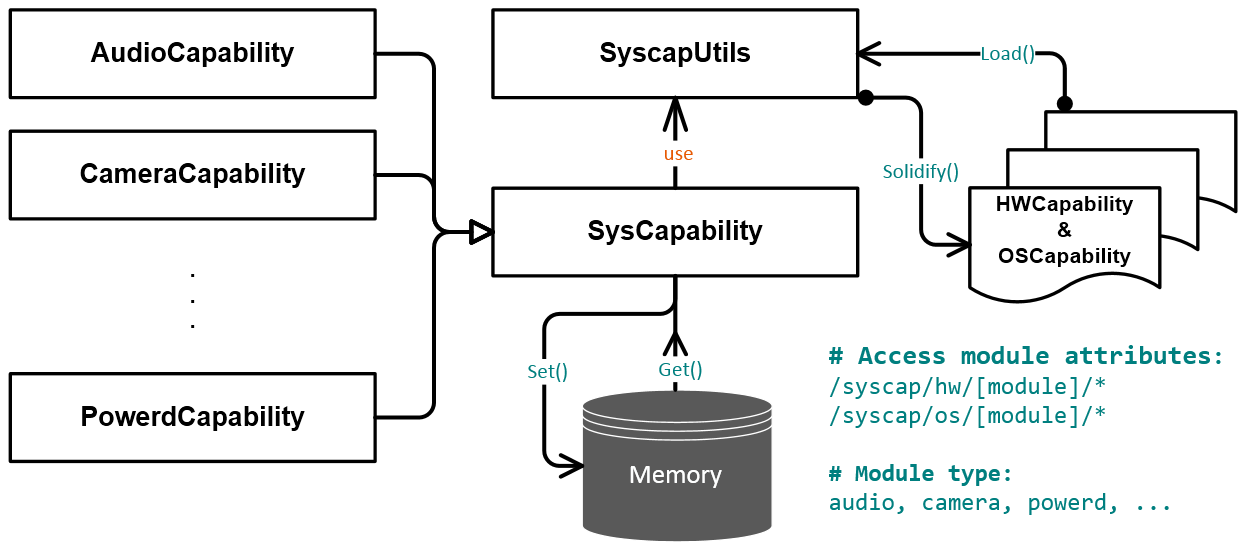
Syscap对上述XML配置文件的访问是通过Parameter Framework达成的。通过封装SyscapUtils单例类和SysCapability虚类,用户只需要知道属性对应的路径表述,就可以获取对应的设置值。相应的文件存放在:
# Header file: [codebase_host]/third_party/corefoundation/include/syscap/SysCapability.h # Souce Implementation file [codebase_host]/third_party/corefoundation/SysCapability.cpp # library generated STATIC LIBRARY: libsyscap.a
模块实现: 模块用户需要继承SysCapability类,并且在yunos.mk包含 libsyscap.a ,然后在代码里可以用 SyscapUtils::getInstance().getSignedIntArray(key, retValue) 的方式就可以拿到之前在XML中定义的默认值,而通过set[XXX]类型的接口也可以把数据写回。
通过上面的基本介绍,此时读者对整个*Syscap* 实现应该有了一定的了解。那么又该如何增加自己模块的描述和访问呢?下文将以powerd模块为例,演示操作。
样例:powerd模块
参考实现:可以用
grep powerd *的方式查看相关的改动
属性列表
要实现powerd模块的参数可配置化,首先需梳理Powerd模块自身的逻辑,将需要暴露给厂商或者其他模块访问的参数提取出来,然后按照既定规则写入配置文件(因篇幅有限,省略大部分属性信息)。
syscap
├── hw
│ └── powerd
│ ├── ambientLuxLevels
│ ├── ambientBacklightLevels
│ └── LowPowerModeSupported
└── os
└── powerd
├── feature
│ ├── AlwaysOnWhenPluggedSupported
│? ├── ScreenSaverActiveOnSleep
│ ├── ScreenSaverActiveOnDock
│ └── wakeUpWhenPluggedOrUnplugged
├── constants
│ └── ...
├── proximity
│ └── ...
├── light
│ └── ...
├── display
│ └── ...
├── lowpowermode
│ └── ...
└── fusionsupport
└── ...
配置文件
第一步,增加schema描述:
- 添加
hw部分。在syscap_schemas_hw_all.xml中添加名为PowerdCapability的属性组ComponentType并定义各种属性、对应的类型以及是否数组,若是需给出数组长度;然后在<InstanceDefinition>域中添加该Component实例化之,最终会成为访问路径上的一级节点 - 添加
os部分。新建syscap_schemas_os_powerd.xml,然后通过预定义的<xi:include />包含在 syscap_schemas.xml 文件中Subsystem: os下的<ComponentType>域里。注意到,syscap_schemas_os_powerd.xml文件使用的是<ComponentTypeSet>域,并且模块里的属性分门别类以<ComponentType>逐项表示,最后全部汇总到PowerdCapability中,然后在<InstanceDefinition>中实例化。**其他的模块文件可以用类似的方式组织后添加。**
第二步,增加config初始化值设定,同样分为两部分:
- 添加
hw部分。于syscap_configs_hw_all.xml文件中添加/syscap/hw/powerd的属性组配置项(ConfigurableElement),然后在<Settings>中逐项添加各个属性的值。 - 添加
os部分。添加新建文件syscap_configs_os_powerd.xml到总开关syscap_configs.xml之中。并且在内容上也依照上面介绍的,逐项添加Configuration、ConfigurableElement和Settings项,这里就不再赘述。
至此,配置项的工作已经完成,其中涉及各项属性支持的格式、类型请参考FAQs。
模块代码
继承SysCapability类实现PowerdSysCapability类,并且实现虚函数getModuleName 指定自己的模块名称powerd,相当于注册powerd模块到系统之中。于loadConfigs里完成系统初始化访问XML的能力,随后通过单例SyscapUtils的接口达到访问各项属性的能力,并且将值可以缓存到本地,用于模块的交互。
注意:PowerdSysCapability要根据模块自身的需求定义接口。
powerd的样例代码放在 [codebase_host]/third_party/corefoundation/test/syscaptest,可以作为模块实现参数化配置调用的参考。
FAQs
- Q: 如果我想将属性写回到ROM,然后下次启动可载入使用,该怎么做?
- A:
Syscap支持的属性访问有**只读**, 读写, 持久性写入等三种方式。在当前结构化组织形式里,我们约定/syscap/hw/*部分为*只读*,即通过setter操作将返回false。模块相关的/syscap/os/[module]/*部分为*可读可写*,初始化阶段后内存中会建立一份副本,getter/setter都将与该副本交互,而不会影响到ROM上原有的XML文件。若模块有*持久性写入*的需求,用于保存模块的critical配置,可以通过Solidify接口实现。 - Q: 属性支持的数据类型有哪些?
- A: 系统所有parameter type以及支持的必需或可选的字段描述,都可以参见
[codebase_host]/third_party/parameter-framework/schemas/Parameter.xsd文件中的描述。 - Q: 每个模块都单独链接libparameter.so,通过Parameter Framework访问XML配置文件,内存开销如何?在低内存设备上使用会否有峰值问题?
- A: Parameter Framework访问XML需要借助于libxml和libparameter两个库,在本地测试中发现,单个应用调用XML后会增加近560KB Pss,这部分Pss也会随着多个模块的使用而被均摊掉,比如5个服务使用则每个服务增加近100KB Pss。若有必要,可以尝试进一步优化,将所有配置信息载入后缓存,释放这些库文件长驻的内存。