资源编排服务ROS(Resource Orchestration Service)可通过ROS模板创建一组阿里云资源。ROS模板为JSON格式文件,用于定义您需要创建的云资源。本教程介绍如何使用ROS模板创建基于ECS和RDS(Relational Database Service)的WordPress环境。
前提条件
- 已注册阿里云账号。如还未注册,请先完成账号注册。
- 账号余额不能低于100元,可以是现金、可用信用额度或者可用于开通产品的代金券。
- 如果您是首次使用ROS,必须先开通ROS服务。ROS服务免费,开通服务不会产生任何费用。
背景信息
RDS是阿里云提供的在线数据库服务,稳定可靠、可弹性伸缩。RDS支持MySQL、SQL Server、PostgreSQL等数据库引擎,并且提供了容灾、备份、恢复、监控、迁移等方面的全套解决方案,帮助您解决数据库运维的烦恼。更多详情,请参见RDS产品文档。
本篇教程介绍如何通过基于ECS和RDS创建WordPress环境模板,创建WordPress环境。
操作步骤
- 登录ROS管理控制台。
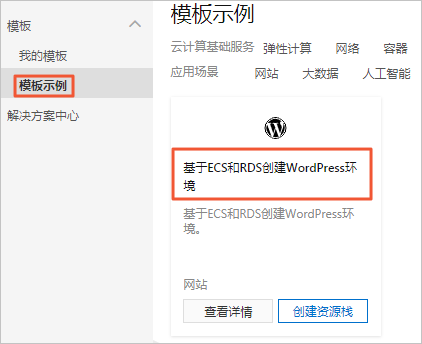
- 选择模板。
- 在左侧导航栏中,单击。
ROS提供的常用模板会在
模板示例页面显示。
- 从模板示例中找到基于ECS和RDS创建WordPress环境。
- 可选:单击查看详情查看模板的JSON文件。
JSON文件各个顶级字段的解释如下表所示。
| 顶级字段 |
解释 |
"ROSTemplateFormatVersion" : "2015-09-01" |
定义模板版本。 |
"Parameters" : { } |
定义模板的一些参数。 本示例中,模板定义的参数包括:镜像ID、实例规格等,并指定了默认值。 |
"Resources" : { } |
定义这个模板将要创建的阿里云资源。 本示例中,申明将要创建一个ECS实例和一个安全组,这里申明的资源属性可以引用Parameters中定义的参数。 |
"Outputs": { } |
定义资源创建完成后,栈需要输出的资源信息。 本示例中,资源创建完成后将输出ECS实例ID、公网IP地址和安全组ID。 |
说明 ROS资源栈模板详情,请参见资源编排的
模板结构说明。
- 单击创建资源栈。
- 配置参数。
- 在顶部菜单栏左上角,选择地域。
- 配置资源栈的模板参数。
资源栈参数说明如下表所示。
| 名称 |
描述 |
| 资源栈名称 |
设置资源栈名。栈名不可重复,创建之后不能修改。 |
| VPC |
VPC CIDR Block |
填写专有网络VPC的私网网段。 更多详情,请参见网络规划。 |
| VSwitch Availability Zone |
选择您需要创建资源的可用区ID。 |
| VSwitch CIDR Block |
交换机的网段。 交换机所指定的网段必须属于其VPC的网段,并且不能与已有的交换机网段重叠。更多详情,请参见网络规划。 |
| ECS |
Instance Type |
选择您需要的ECS实例规格。 ECS实例规格详情,请参见实例规格族。 |
| Image |
填写创建ECS实例时使用的镜像ID。 |
| Instance Password |
设置ECS实例的登录密码。 根据模板定义,密码由大写字母、小写字母、数字、特殊字符中的任意三种组成,特殊字符为()`~!@#$%^&*-_+=|{}[]:;'<>,.?/,密码长度范围是8~30个字符。
说明 Windows实例不能以斜线号(/)为密码首字符。
|
| RDS |
DB Instance Class |
云数据库RDS的实例类型。 |
| Engine |
选择您需要的数据库引擎。 |
| DB Instance Storage |
云数据库RDS的容量规格。 |
| DB Name |
填写WordPress数据库名。 |
| DB Username |
填写WordPress数据库的用户名。 |
| DB Password |
设置访问WordPress数据库的密码。 根据模板定义,密码由字母、数字、下划线(_)组成,密码长度范围是为6~32个字符。 |
- 单击下一步。
- 配置资源栈。
资源栈配置说明如下表所示。
| 名称 |
描述 |
| 资源栈策略(可选) |
资源栈策略。 |
| 失败时回滚 |
资源创建失败时是否回滚。
- 如果选择已启用,那么创建过程中发生任何失败(包括创建超时),ROS都会删除已经创建成功的资源。
- 如果选择已禁用,那么创建过程中发生任何失败(包括创建超时),ROS不会删除已经创建成功的资源。
|
| 超时设置 |
设置创建资源的超时时间。如果在设置的时间段内资源未创建成功,则判断超时。 |
- 单击下一步。
- 确认资源栈参数信息是否正确。
- 单击创建。
执行结果
在左侧导航栏,单击
资源栈,从顶部菜单栏处选择您创建的栈所在的地域,即可查看您新建的资源栈和资源栈的状态。当资源栈状态为
创建成功时,表示您已成功创建资源栈。
后续步骤
单击栈名,进入已创建资源栈的详情页面。单击以下页签可以了解已创建资源栈的相关信息。
- 资源栈信息:可查看资源栈的基本信息、状态、创建资源的超时时间等。
- 事件:可查看ROS创建这个资源栈时的操作记录。任何涉及资源栈的操作失败后,都会显示具体操作失败的原因。
- 资源:可查看资源栈中包含的所有资源。
- 模板:可查看资源栈的原始模板。